Metal Interlace
Zero-Welding AssemblyMetal Interlace from Yi-Liang Ko on Vimeo.



The
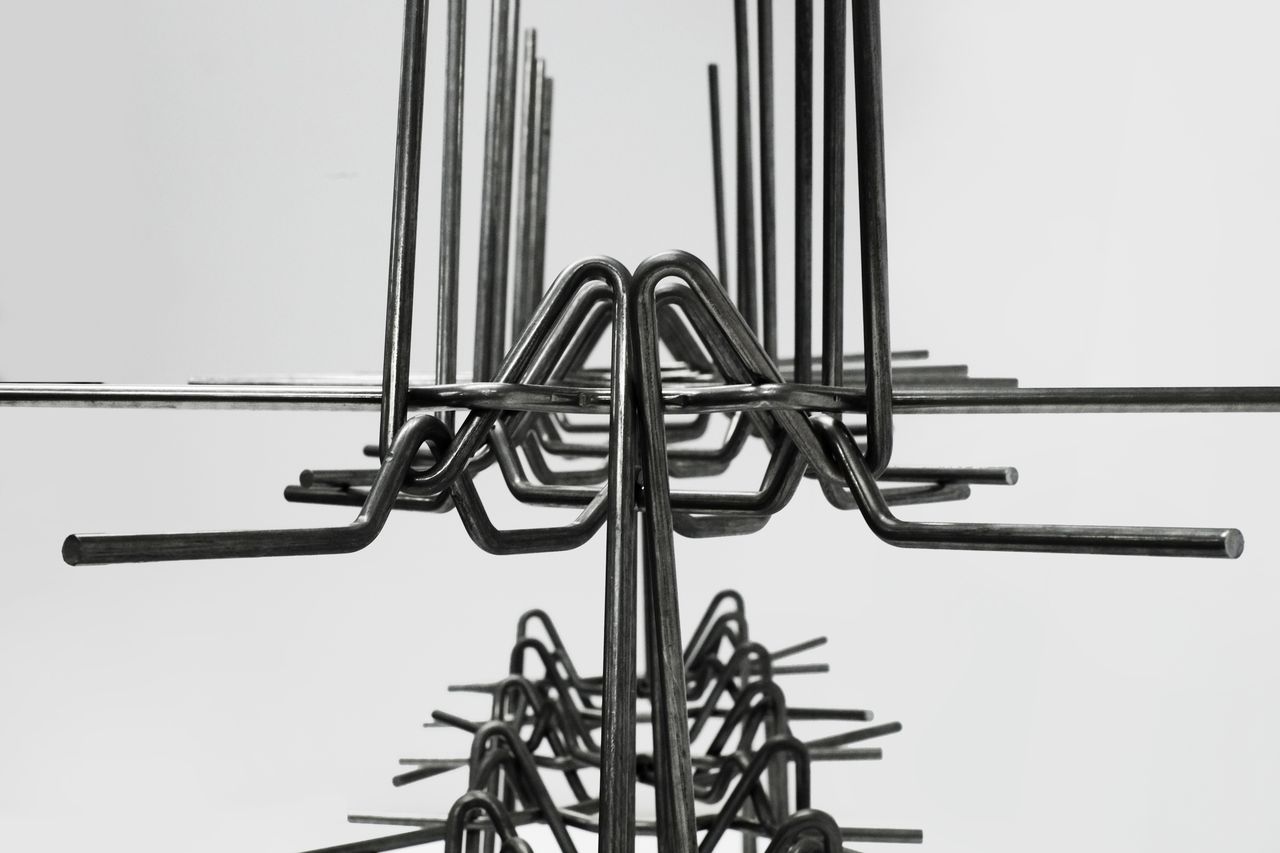
robotic rod bending process developed at the Taubman College allows a generic
industrial robot to cut and bend steel rods into specific length shapes. Based
on the tools above, Metal Interlace aims to develop an aggregation system
without welding. Through exploring different lengths, curvatures, and angles,
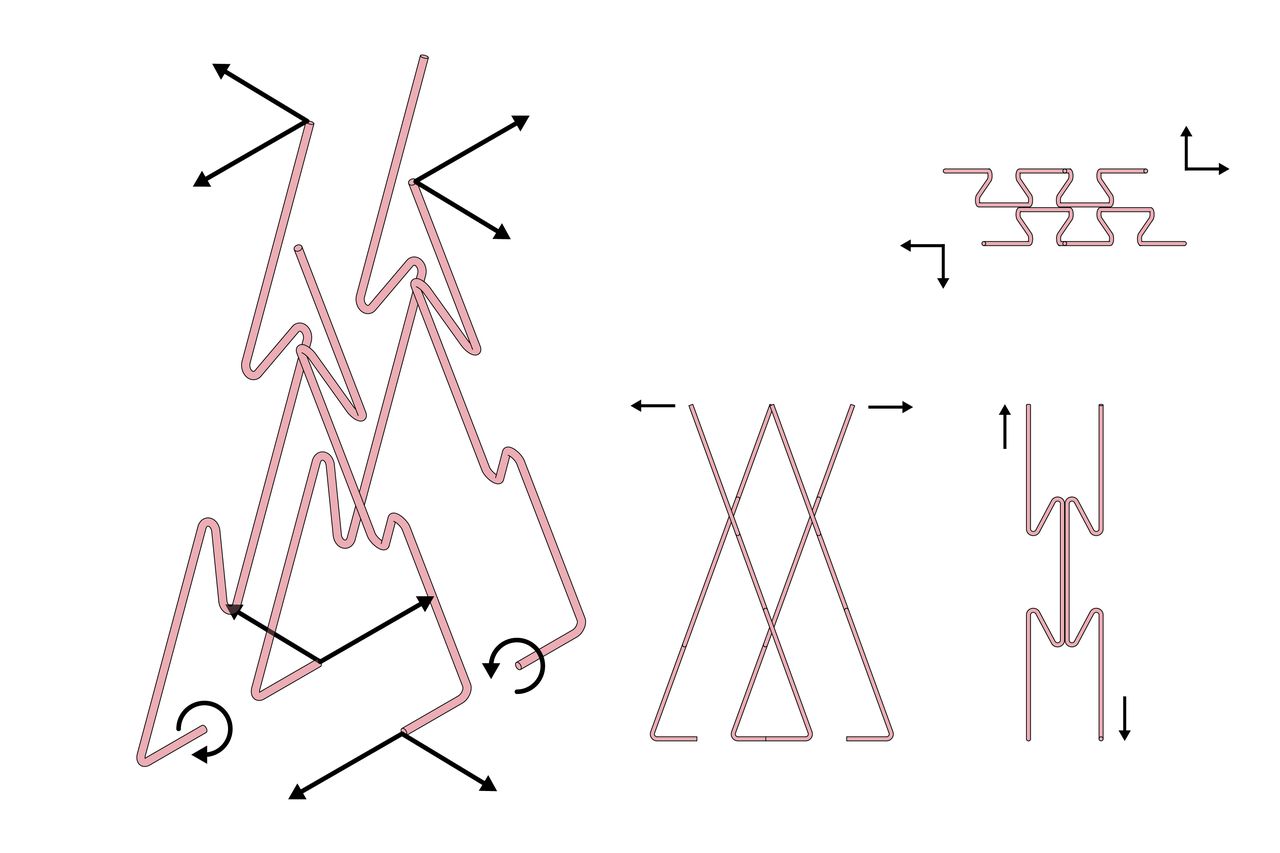
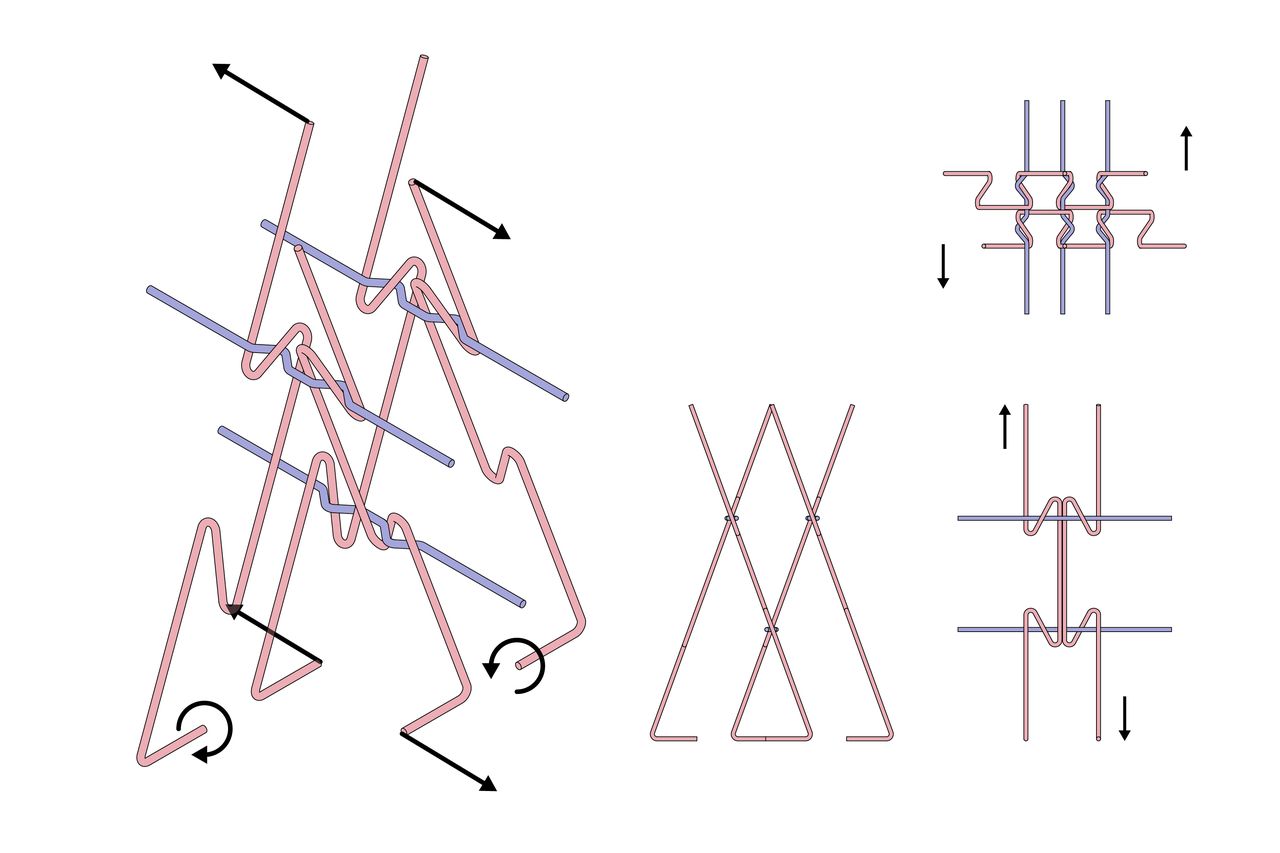
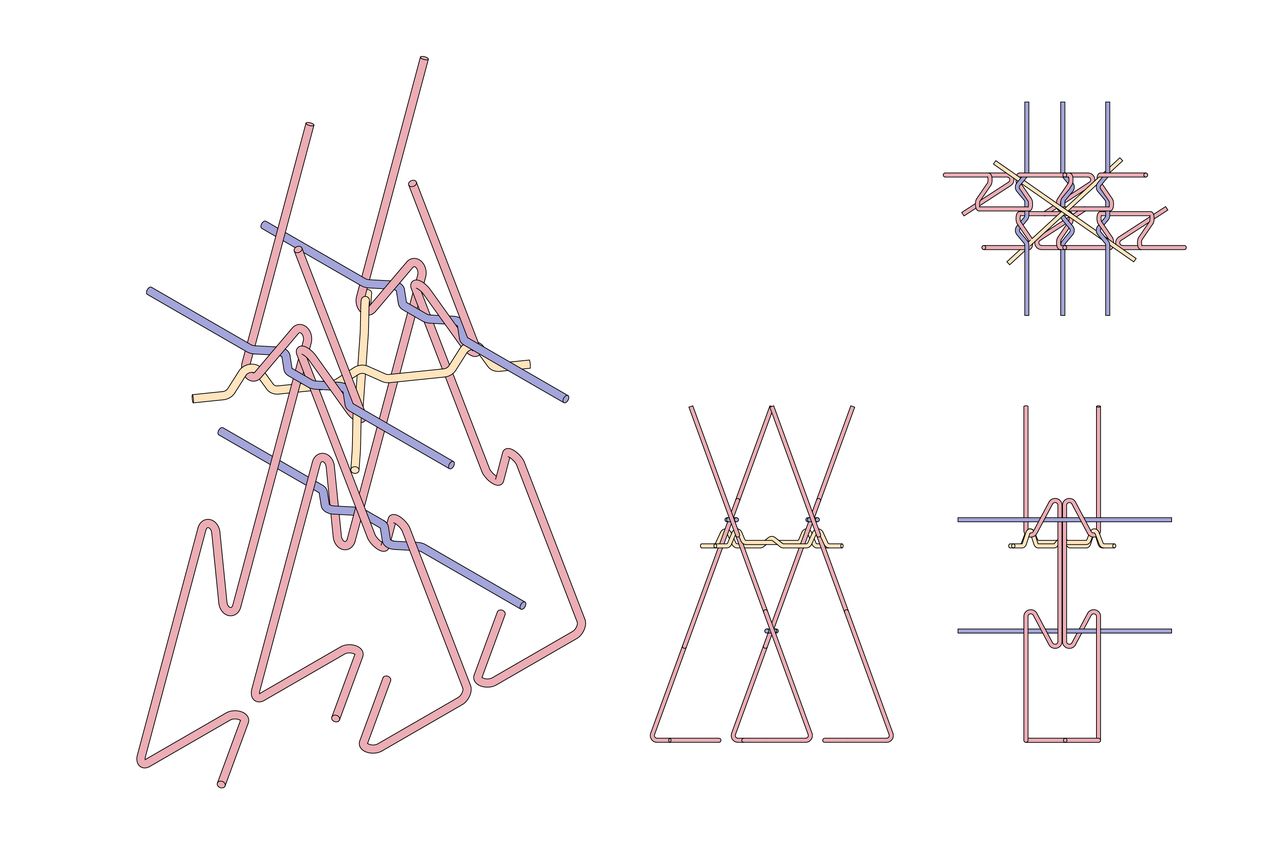
we create 3 types of 2D units and a specific assembly order to form 3D
geometry. The main idea is utilizing hook systems to connect different units
together by a series of actions such as sliding, rotating, and folding. The
limitation of rod bender’s
folding angle and 7-Axis Robot’s
grip length constrain the geometry of each rod. Therefore, this is an
experiment played between digital modeling and physical restriction back and
forth. For the final piece, we created an assembly system for a foldable and
continuous metal fence.
year: Fall 2018
type: Digital Fabrication
course: Robotic Engagement, Taubman College
partner: Maryam AlJomairi, Joon Kang
advisor: Wes McGee
status: Completed
size: 52” X 12” X 24”
location: Ann Arbor, MI